Inveniendae Mirabiles Prodest Manipulatoris Parallelis
Quid est Manipulator Parallelus?
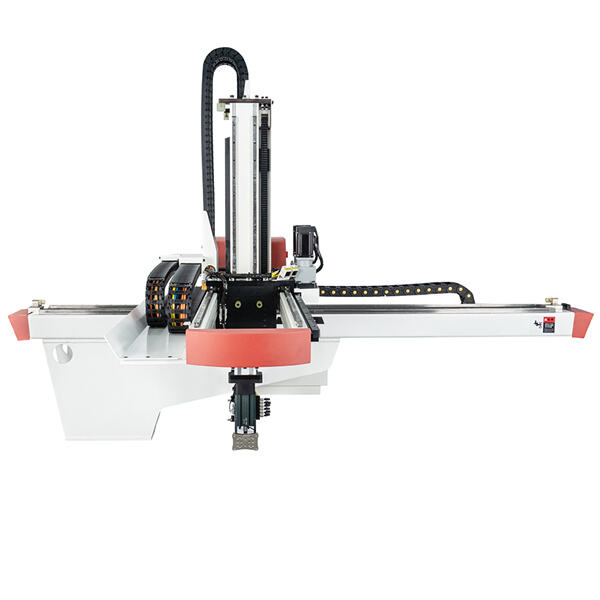
Manipulator synchronus describi potest ut systema quod vere technicum est et ex partibus compluribus rigidis per pares kinematicos constat. HEEEXii manipulator parallelus utique adhibetur ad praecisam positionem onerum in applicationibus variis. Huiusmodi manipulator ex basi fixa, platforma mobiliter et aggregatu catenarum quae crura kinematica sunt quae basin ad platformam coniungunt constat. Crura in parallelum disponuntur, quod manipulatorem movi modo coordinato facit.
Unum ex innovationibus quae est principalis manipulator qui est parallel geometrico designio. Ita construitur modo superne tensus et certe rigidus ut offert meliorem firmitatem vimque atque exactitudinem quam alii manipulatores. HEEEXii manipulator serialis et manipulator parallelus praeterea, structura parallela quae est kinematica cum genere manipulatoris permitit ei ut moveatur simul in spatio tridimensionali, quod est praecise theraputicum pro applicationibus quae volunt altam accurateiam.

Beneficium additum est magnum manipulatoris, quod non est omnino difficile uti. Apparatus saepe habet controles qui possunt esse simplices et minima, quod eum facit amicum usui. HEEEXii fabricatores brachiorum roboticorum industrialium praeterea, catenae duplices kinematicae manipulatorum parallelorum redundanciam praebent quae securitatem apparatus meliorem reddit. Si aliquot catenae deficiant, aliae possunt onus praebere, quod casus prohibet et accidentia vitat.
Manipulatores paralleli ad diuturnitatem sunt designati, et qualitas eorum est optima. Ex materialibus high-grade fiunt, quae durabiles sunt et resistentes ad usum et deteriorem. HEEEXii accessibile brachium roboticum item, isti saepe laborant sub severa examinatione ut certi sint quod fideles sint et requisita quae postulantur adimpleant. Quoad servitium, manipulatores paralleli non tam difficile sunt conservandi, et componentes qui possunt esse in supplemendo facile habentur si forte fuerit reparatio necessaria.

Guangdong Heeexii Robot Technologia Co. Ltd. condita anno 2019 et est praestans societas quae se concentrat in R et D fabricatione necnon venditione robotum industrialium. Societas habet multos operarios qui decem annos laboraverunt in manipulatore parallelo.
Habemus robotores servo pleni 3 et 5 axis idonei ad introitum summum simul cum praelegentes roborum Fanuc sex axis. Noster nuntius potest designare totam cellam automationis, manipulatoris parallelis instrumenta brachiorum extremorum, apparatus posticus ad mensuram, necnon varia instrumenta formatoribus utendum. Technologia nucleus R et D adheret viae investigationis et developmentis independente et acquisivit numerosas patentias et iura proprietatis intellectualis.
Heeexii Robot distinguitur per profectionem excellentiae necnon determinationem ad continuandum necnon facultatem ad innovandum, et crescentem {{keyword}} et desiderium excellendi ultra se ipsum. professionalitas per concentrationem; excellentia quia professionalitas. Heeexii Robot semper adheret spiritui primae qualitatis controlis et constantis incrementi, praebens stabiles et fideles utentibus, dum facit contributiones ad Chinensis fabricam innovationis.
Productus quos societas uti solebat per latam industriarum multitudinem, ut computatores, domesticorum instrumentorum conlationes pro optoelectronicis, automobilium et eorum componentium, industria praecisionis rotae dentatae, industria PET praeformarum domesticarum necessitatium, mobilis communicationis, medicinae apparatus conlationes parallel manipulator.
Guangdong Heeexii Robot Technologia Co., Ltd. (abbreviation: Hengxing, HEEEXII), constituta in anno 2019, est novum sidus enterprise concentratum super R&D, fabricationem, et venditionem robotum industrialium injectio formae.
Iura omnia reservantur Guangdong Heeexii Robot Technology Co., Ltd. © Societas Technologiae Roboticae Guangdong Heeexii.
 EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 LV
LV
 SR
SR
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 MS
MS
 GA
GA
 BE
BE
 IS
IS
 LA
LA
 MN
MN
 KK
KK









