Бренд: HEEEXii
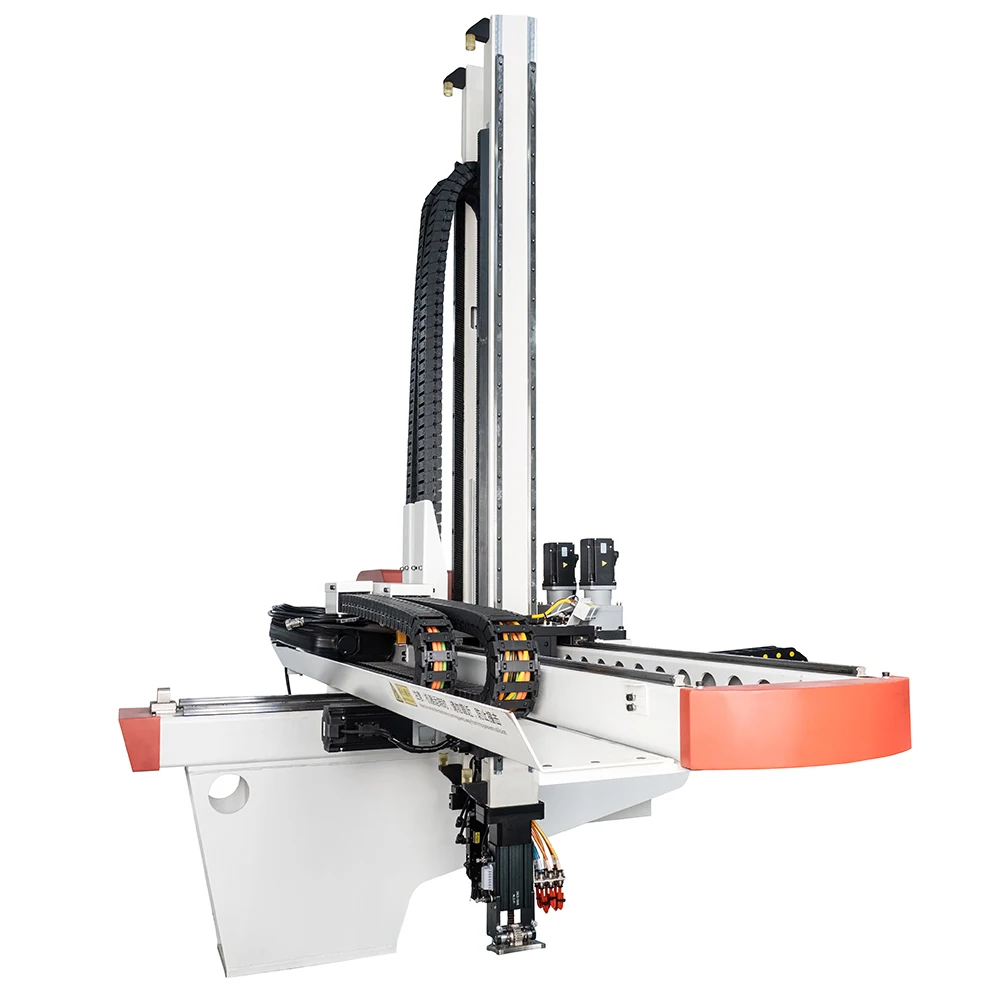
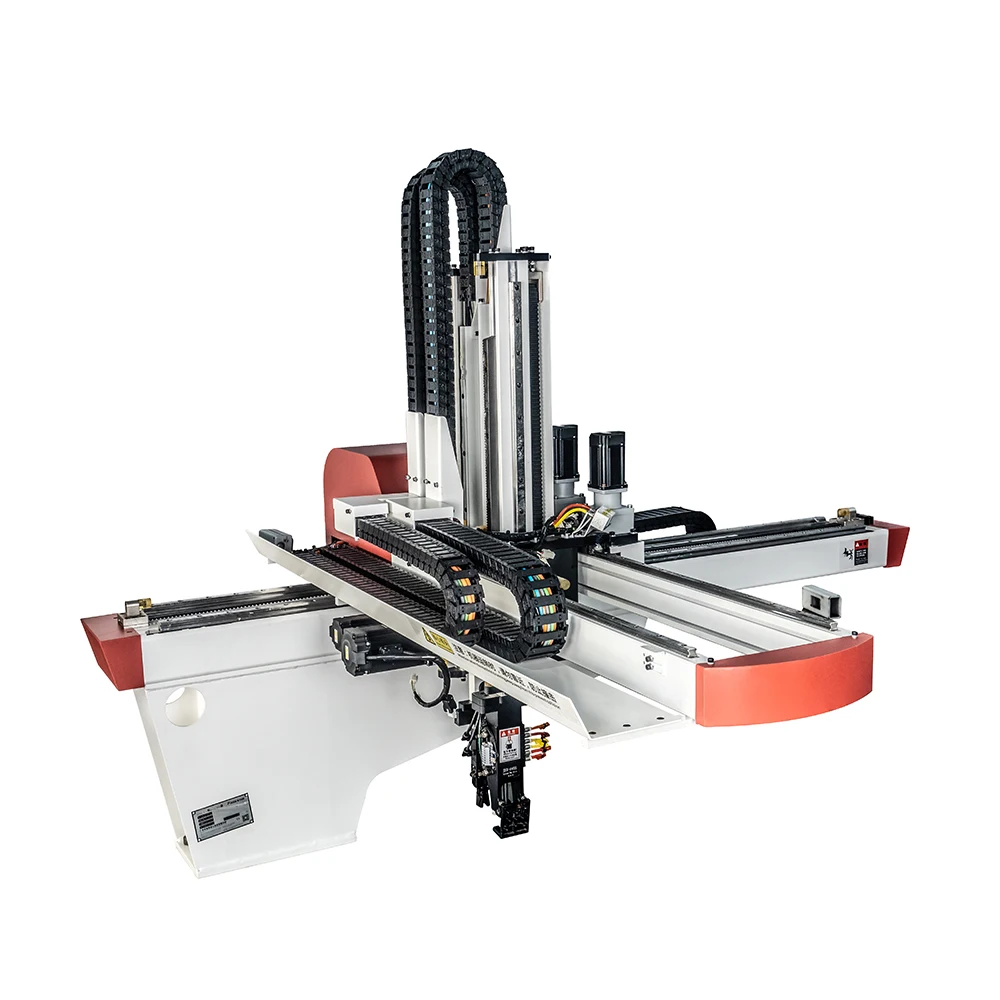
Манипулятор робота с нулевой гравитацией HEEEXii Роботизированная рука промышленного манипулятора для торакальной манипуляции является важным устройством практически для любого завода или коммерческого рабочего пространства. Эта сложная роботизированная рука может выполнять множество задач, включая торакальную манипуляцию легко.
Внешний вид манипулятора с нулевой гравитацией Роботизированная Рука Промышленный Манипулятор Грудная Манипуляция позволяет ему эффективно работать в различных средах, а также его компактный размер гарантирует использование в местах с ограниченным пространством. Устройство может крепиться к различным поверхностям, поэтому оно может быть адаптировано под ваши конкретные потребности.
Установка HEEEXii Zero Gravity Manipulator Robotic Arm Industrial Manipulator Thoracic Manipulation имеет максимальную грузоподъемность 10 кг и способна перемещать, поднимать и манипулировать широким диапазоном предметов, что делает ее универсальной. Ее интеллектуальная система управления обеспечивает плавные и точные движения, что делает ее идеальной для задач, требующих высокой точности.
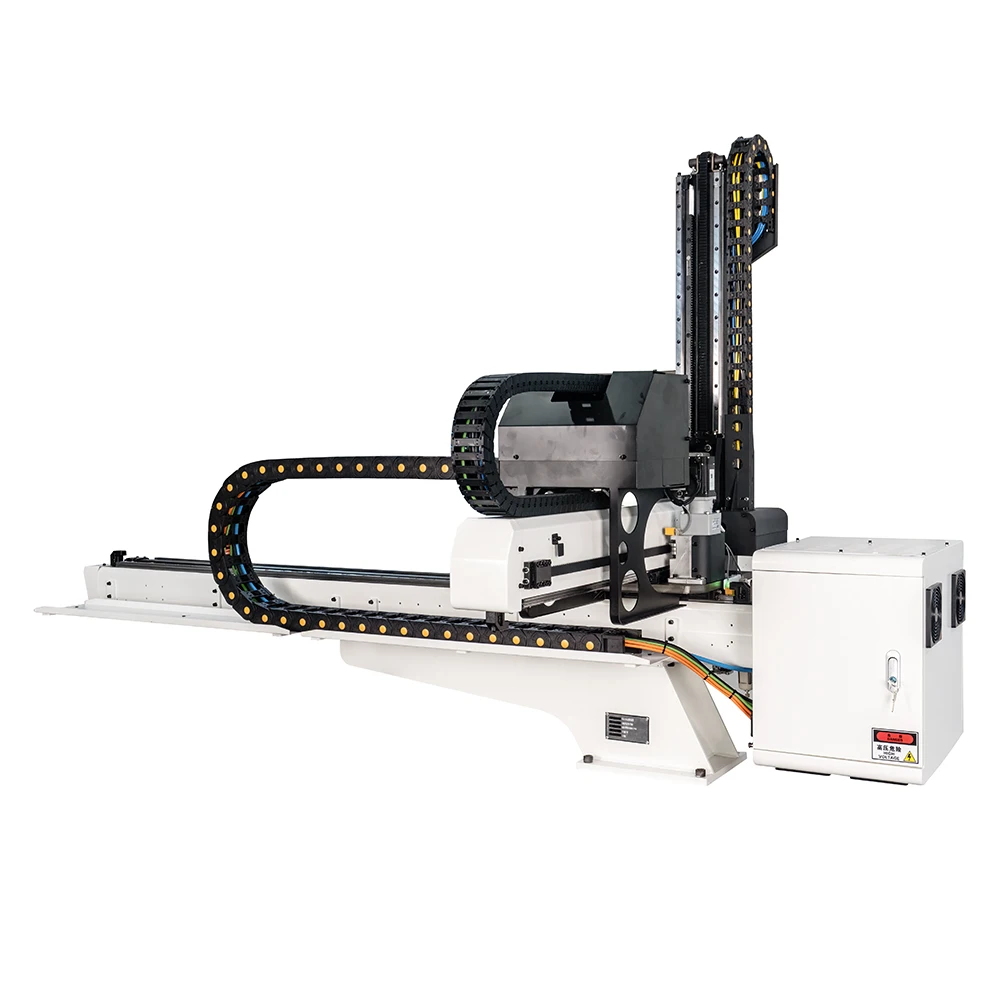
Среди множества существенных преимуществ манипулятора HEEEXii Zero Gravity Manipulator Robotic Arm Industrial Manipulator Thoracic Manipulation — это функция нулевой гравитации. Эта особенность, требующая противовеса, позволяет выполнять движения плавно и легко. Функция нулевой гравитации также снижает усталость оператора, повышая эффективность работы.
Манипулятор роботизированной руки с функцией нулевой гравитации также имеет пользовательский интерфейс, который можно просто запрограммировать для выполнения различных задач. Контроллер руки несложно использовать, и он имеет интуитивно понятный пользовательский интерфейс, что делает процесс бесшовным.
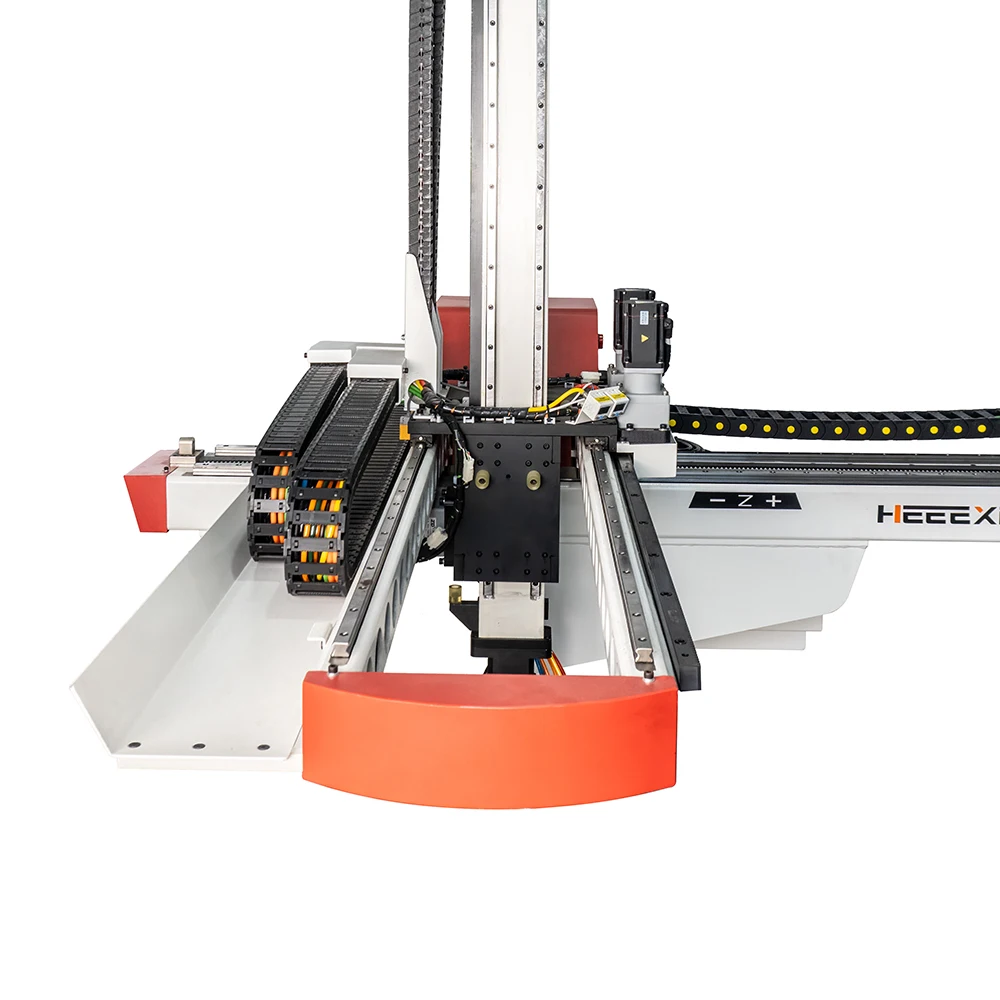
Манипулятор HEEEXii Zero Gravity Manipulator Роботизированная Рука Промышленный Манипулятор Грудной Манипулятор может быть компетентным устройством, которое не только является необходимым инструментом в современных коммерческих средах. При скорости, которая достигает максимума и повторяемости ± 0,1 мм, он может быстро выполнять задачи с высокой степенью точности. Это снижает время производства и повышает эффективность рабочего пространства, что приводит к экономии средств.
Манипулятор Роботизированная Рука Промышленный Манипулятор Грудной Манипулятор обычно изготавливается из прочных материалов, что гарантирует надежность и долговечность. Он требует минимального обслуживания и может выдерживать жесткие коммерческие условия без ущерба для своей производительности или функциональности.
Название продукта |
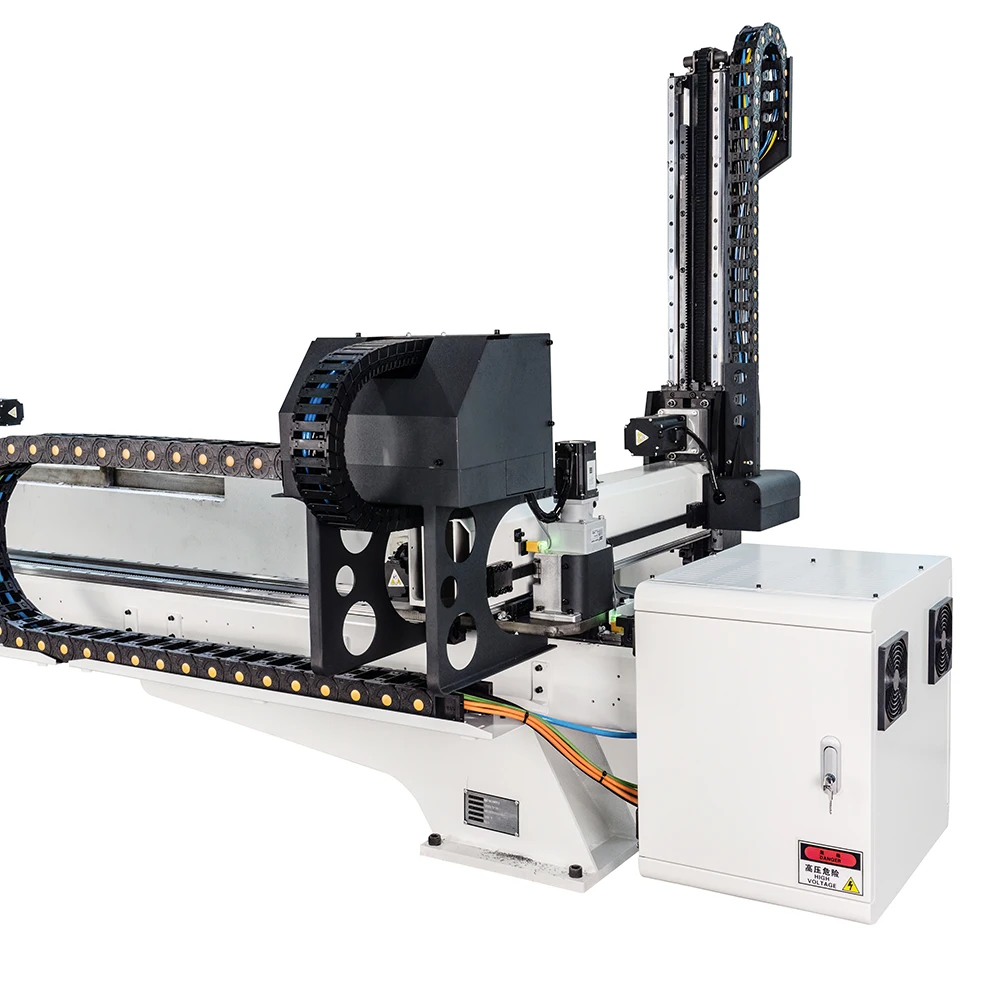
HXMB-5S Il -серия Встроенный тип полностью сервоприводный манипулятор |
Макс. нагрузка |
20КГ |
Время извлечения |
2.62Сек |
Приводная система |
X1,X2,Y1,Y2,ZAC Сервопривод |
Структура руки |
Одиночный тип |
Мощность |
AC220В 20А |
Потребление энергии |
0.7Квт/ч |
Угол захвата |
90 |
Давление воздуха |
0.5-0.8 Мпа |
Потребление воздуха |
1.3 NL/цикл |






































Guangdong Heeexii Robot Technology Co., Ltd. (abbreviation: Hengxing, HEEEXII), established in 2019, is a new star enterprise focusing on R&D, manufacturing, and sales of industrial injection molding robots.
Copyright © Guangdong Heeexii Robot Technology Co., Ltd. Все права защищены
 EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 LV
LV
 SR
SR
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 MS
MS
 GA
GA
 BE
BE
 IS
IS
 LA
LA
 MN
MN
 KK
KK