Marca: HEEEXii
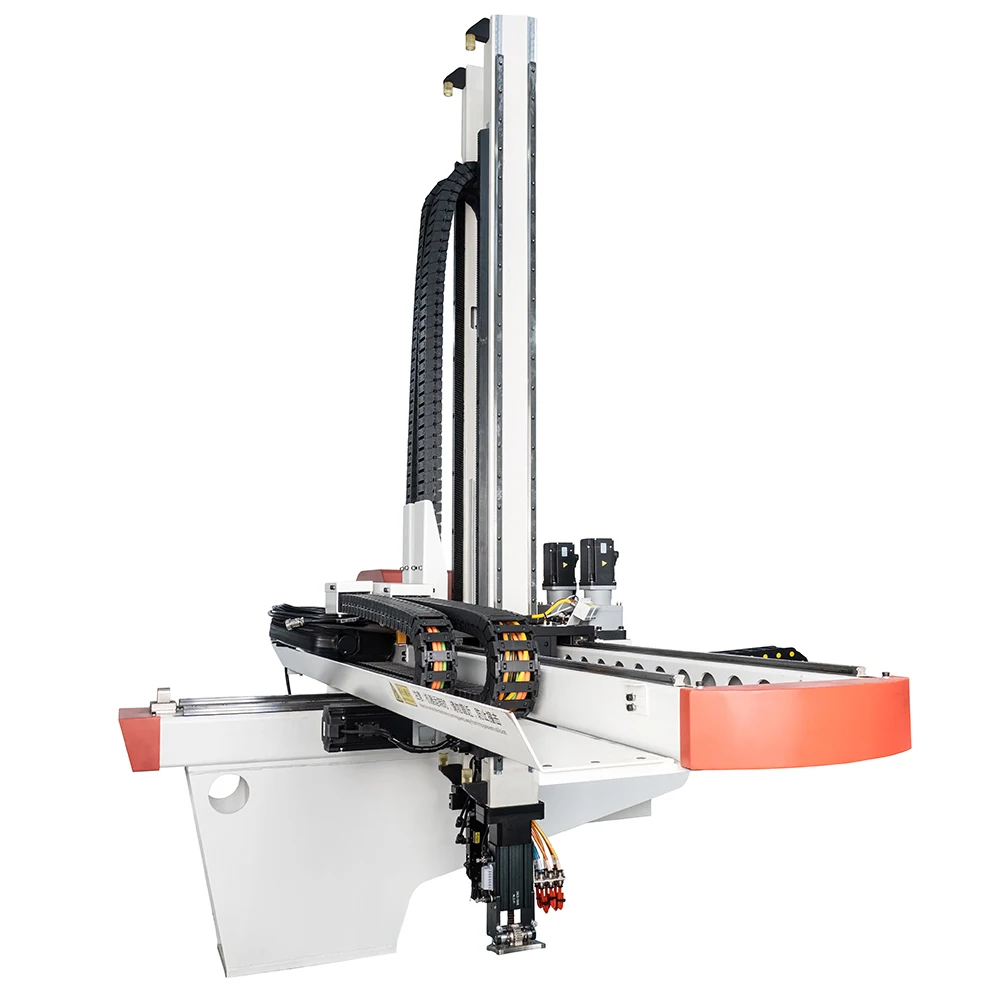
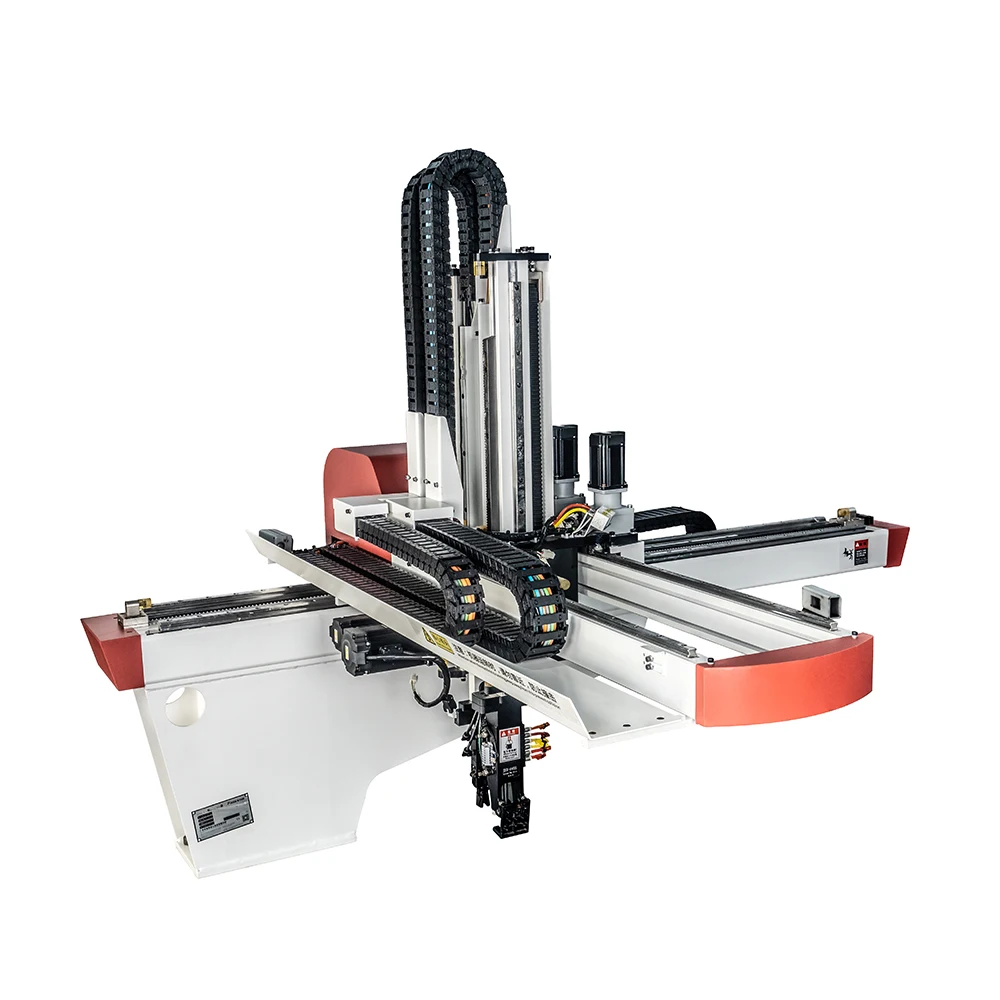
Manipulator Roboticus Brachium Industrialis Thoracica Manipulatio HEEEXii Zero Gravity est instrumentum necessarium prope omnibus fabricis aut spatiis commercialibus operis. Hoc brachium, quod est sophistica tum roboticum, potest multas operationes gerere, inter eas etiam thoracicam manipulationem faciliter.
Apparitio Manipulatoris Robotici Brachii Industrialis Thoracicae Manipulationis Zero Gravity permitit ei efficaciter operari in variis ambientibus ac parvo eius magnitudine, quae certificat te posse eum in areis angustis uti. Praeterea, hoc ad varias superficies alligari potest, ita ut specificis tuis necessitatibus conformetur.
Manipulator Roboticus Brachium Industrialis HEEEXii Zero Gravity Thoracica habet capacitatem maximam oneris 10kg et id portabit, levabit et manipulabit latissimam varietatem numerorum, eam faciendam versatilem. Systema eius intelligentiae pro motibus lenibus et exactis, reddens eam perfectam pro operibus quae maiorem quantitatem accurate quaerunt.
Inter multa magna beneficia Manipulatoris Robotici Brachii Industrialis HEEEXii Zero Gravity Thoracica est feature zero-gravitas. Haec feature specialis non requirit pondus contrabalanse et permittit motus lenes et facilem tendentiam. Functio zero-gravitatis insuper fatigationem operatoris minuit, efficientiam in opere augens.
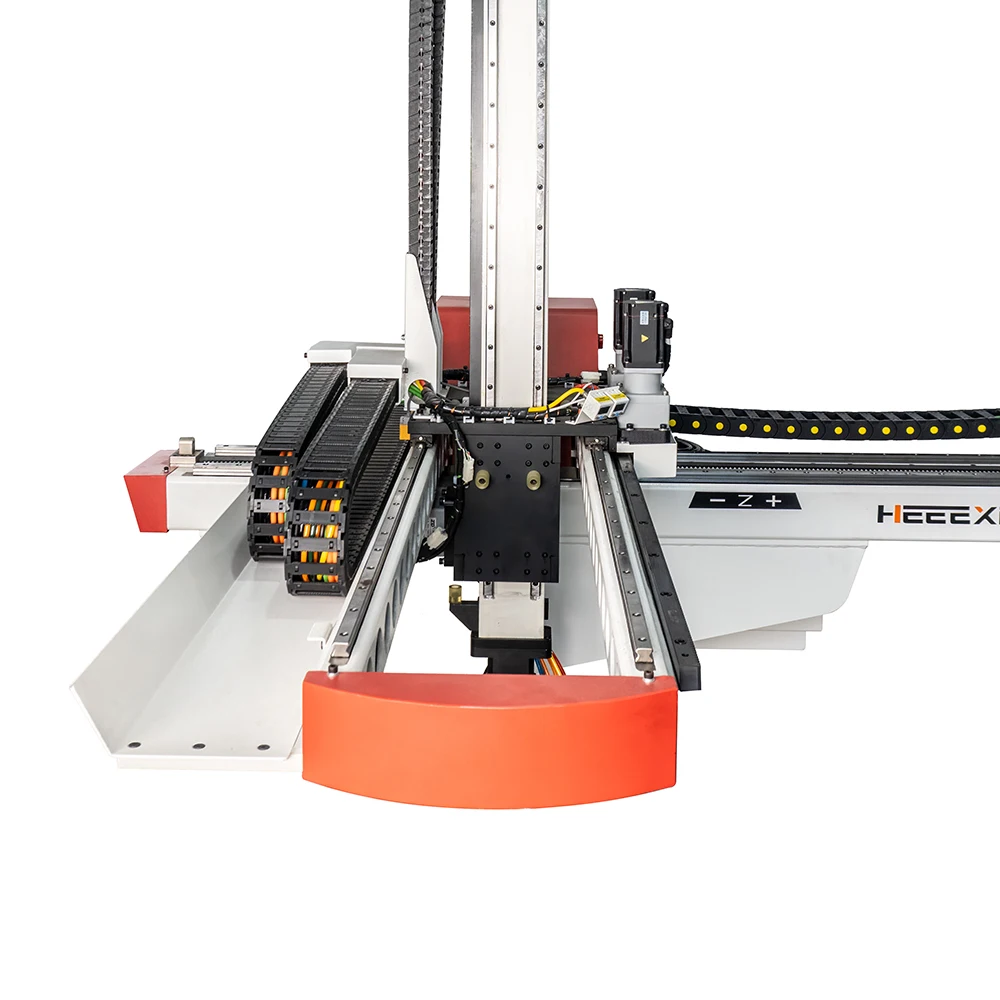
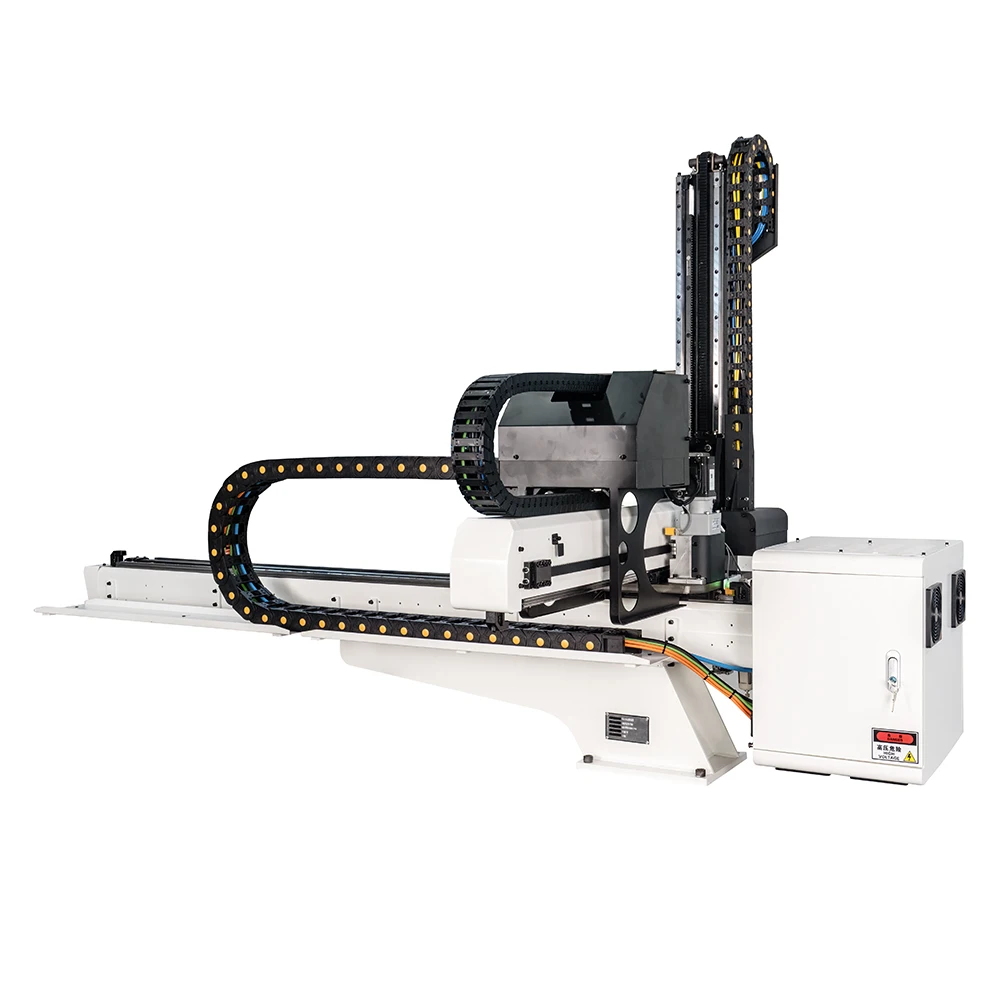
Manipulator Roboticus Brachium Industrialis Manipulator Thoracicus in Zero Gravitate etiam applicationem praebet quae est facilis ad usum et potest esse simpliciter programmata ad complenda multa opera diversa. Controller brachii non est difficile ad usum et hoc habet interfaciem intuitivam facientem suum processum sine intermissione.
HEEEXii Manipulator Roboticus Brachium Industrialis Manipulator Thoracicus in Zero Gravitate potest esse instrumentum idoneum, non solum quod est ferramentum necessarium in modernis-commercialibus ambientibus. Ad velocitatem maximam certam et repetitionem +\/ - 0.1mm, potest cito complere opera cum alto gradu. Hoc diminuit tempus productionis et auget efficientiam in spatio operis, causans economiam pecuniae.
Manipulator Roboticus Brachium Industriale Manipulator Thoracis Manipulatio, solita confici ex materialibus durabilibus quae fidem et durabilitatem praebent. Opus habet minimam conservationem, quae potest sustinere ambientes duros commerciales sine eius executione vel functionalitate compromittenda.
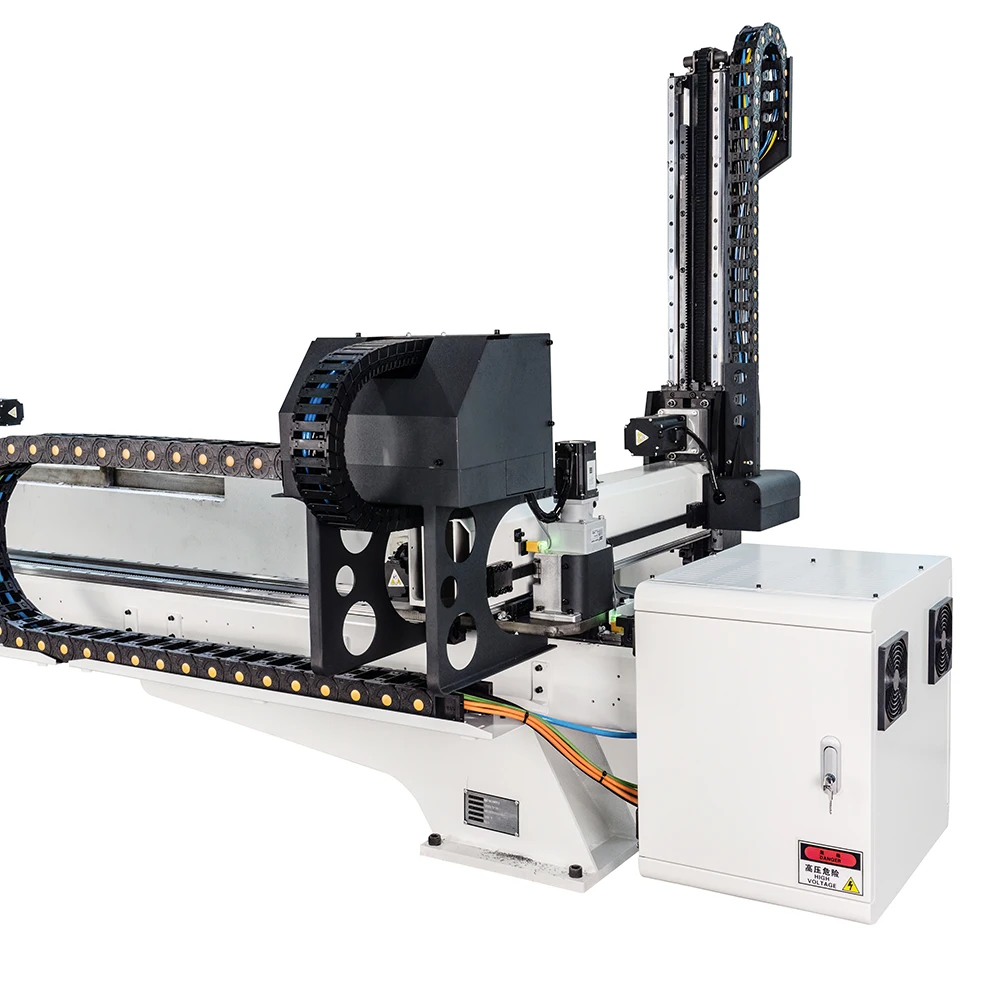
Nomen Producti |
HXMB-5S Il -series Embeditus typus plenus servo manipulator |
Max. Onus |
20kg |
Tempus extractio |
2.62Sec |
Systema propulsionis |
X1,X2,Y1,Y2,ZAC Motor servo |
Structura brachii |
Unus typus |
Potentia |
AC220V 20A |
Consumptio potentiae |
0.7Kw/h |
Angulus chelae |
90 |
Pressio aeris |
0.5-0.8 Mpa |
Consumptio aeris |
1.3 NL/cyclus |






































Guangdong Heeexii Robot Technology Co., Ltd. (abbreviation: Hengxing, HEEEXII), established in 2019, is a new star enterprise focusing on R&D, manufacturing, and sales of industrial injection molding robots.
Iura omnia reservantur Guangdong Heeexii Robot Technology Co., Ltd. © Societas Technologiae Roboticae Guangdong Heeexii.
 EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 LV
LV
 SR
SR
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 MS
MS
 GA
GA
 BE
BE
 IS
IS
 LA
LA
 MN
MN
 KK
KK